兰州大学信息科学与工程学院DSLAB农业机器人团队自2018年创立以来,积极学习国内外智慧农田与智能农机的先进案例,立足甘肃的农业与气候条件,着眼未来中国“谁来种地”的世纪之问,打造具有自主知识产权的农业机器人团队,设计研发独立自主、自动化和数字化的农业机器人,解决智慧农业中农机智能化的痛点。
🚜 第一代农业机器人


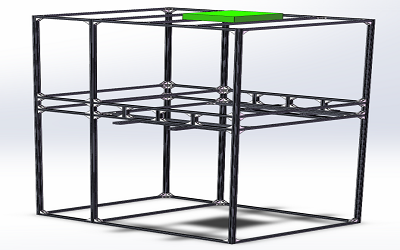
图1 第一代农业机器人
筚路蓝缕启山林,栉风沐雨砥砺行。尽管公开的农业机器人资料缺乏诸多实践细节,我们团队怀着虚心研习不惧困难的拼搏精神,一步一个脚印,从简单的实验框架逐步迭代到可以实践的农业机器人。项目初期,我们团队设计组装了第一辆简单的小车进行数据采集和目标检测任务(见图1)。期间,我们经历了许多次失败,也需要到很多宝贵的经验,为后来我们团队设计开发第二代农业机器人奠定基础。
🚜 第二代农业机器人
立足新的起点,迈上新的征程。积累了相当的实践经验后,团队设计并开发了第二代农业机器人,根据使用环境分为四轮四转式和履带式两个版本。其中,四轮四转农业机器人(图2)可以在间作的农田中快速灵活移动,通过摄像头捕获农田信息,并通过搭载的滑台和除草电机进行精确切削,旨在解决兰州百合打顶人工操作费时劳力的问题。


图2 第二代四轮四转农业机器人
由于甘肃、云南、西藏等省份农田多山地丘陵,农田之间不平整,我们团队设计了履带式农业机器人(图3)。尽管履带式机器人无法做到四轮四转机器人的灵活移动,但机器人的动力电机进行了增强,加上履带结构,使这款机器人能够满足载重300kg进行30度爬坡,满足大部分改造后的丘陵山地农田。


图3 第二代履带式农业机器人
上述两款机器人的操作平台均可独立替换,满足不同环境下农业操作需求。目前,我们为两台农业机器人加装了三轴云台、推杆和主轴电机组成的执行机构,以满足《面向干旱半干旱梯田的无人除草与作物智能监测装备创制》中对百合自动化打顶的需求。该操作平台还可以加装水箱、药箱和其他农具,完成精准灌溉、施肥、采摘等农业操作。
🌿 数据平台
此外,我们团队也十分重视农田的数字化进程,设计开发了农业数字化平台(图4),对农田传感器数据和机器人数据进行汇总和分析,推进农田水肥一体化和农机智能化基础上农业智能化,提供切实可行的数字化农业解决方案。

图4 农业数字化平台
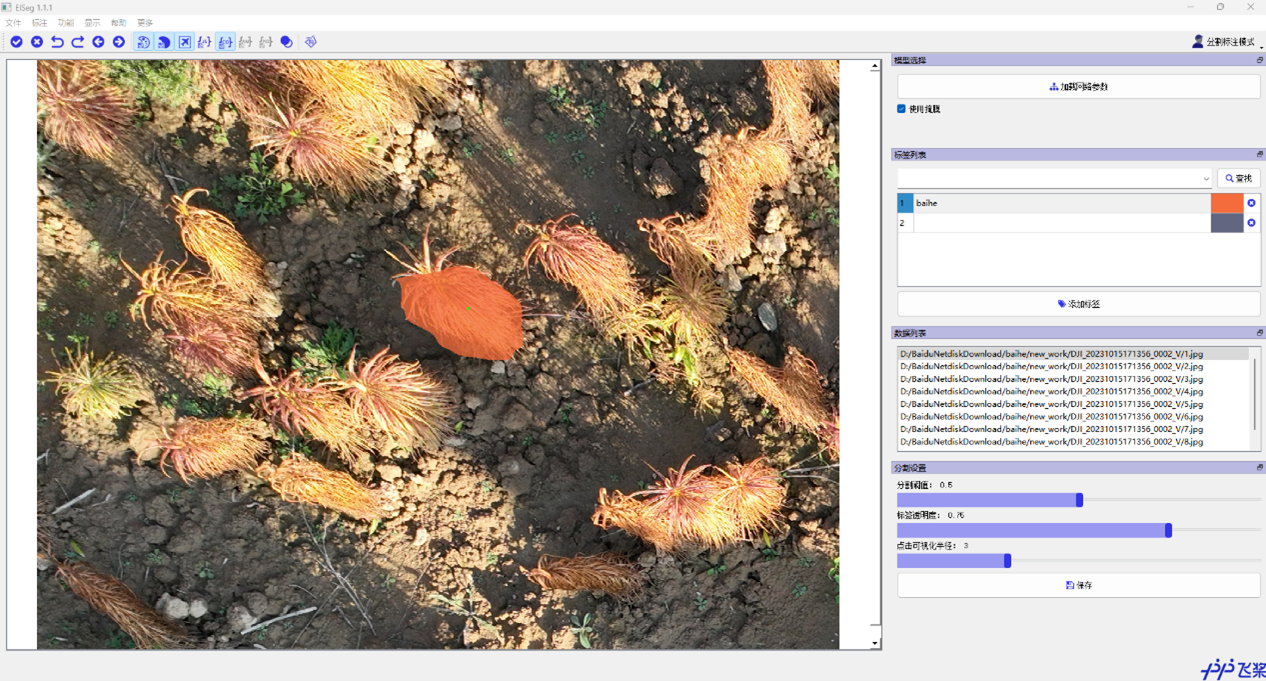
图5 兰州百合数据集
除上述实践外,我们团队也取得了诸多科研成果,包括高水平论文八篇,发明专利授权两项,授权实用新型专利两项,软著两项,项目开源代码库,包含一万八千张图片的土豆杂草数据集,和预计包含张图片的百合杂草数据集。
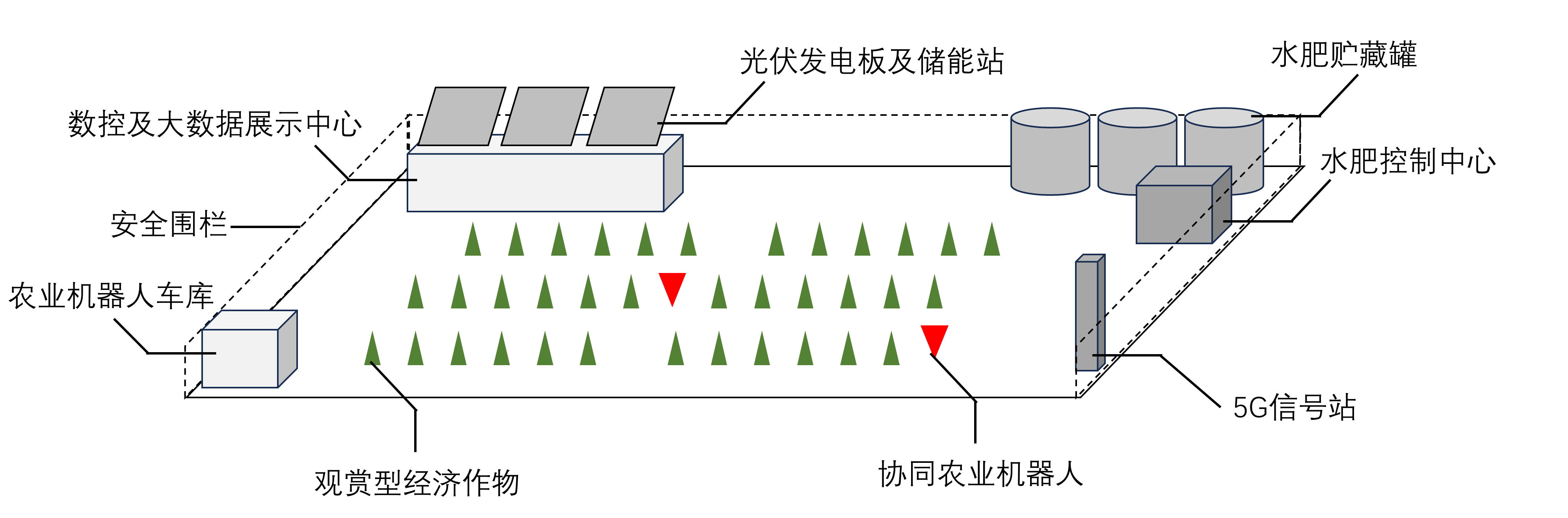
图6 智能农场概念图
目前,团队计划继续推进农田数字化研究工作,旨在实现农作物的“耕种管收”自动化和农田农机智能化调度。我们计划在申请的土地上种植兰州市市花-“苦水玫瑰”。它具有原始天然灌木基因,长期处于高海拔、寒冷、干旱少雨的生长环境中,形成了“苦水玫瑰”特有的品质和优势,具有很高的经济和科研价值。对该区域进行水肥一体化改造后,我们团队计划架设多种环境传感器与无线网络,初步实现灌溉、给肥自动化。并部署农业机器人所需的基站和控制中心,满足团队农业机器人的运行需求。 该区域建成后,不仅可以作为智慧农业示范园区,还可以作为人工智能与自动化教育基地,和观光农业展示区。项目在研究中需要结合实际情况进行人工智能部署和自动化实践,团队中教授、副教授和博士可以对感兴趣的同学进行讲解和指导,将理论知识落到实处。而本项目计划种植的苦水玫瑰具有较高的观赏价值,兰州市花与智慧农业的结合势必碰撞出独特美丽的火花。
开源项目、数据集和科研成果
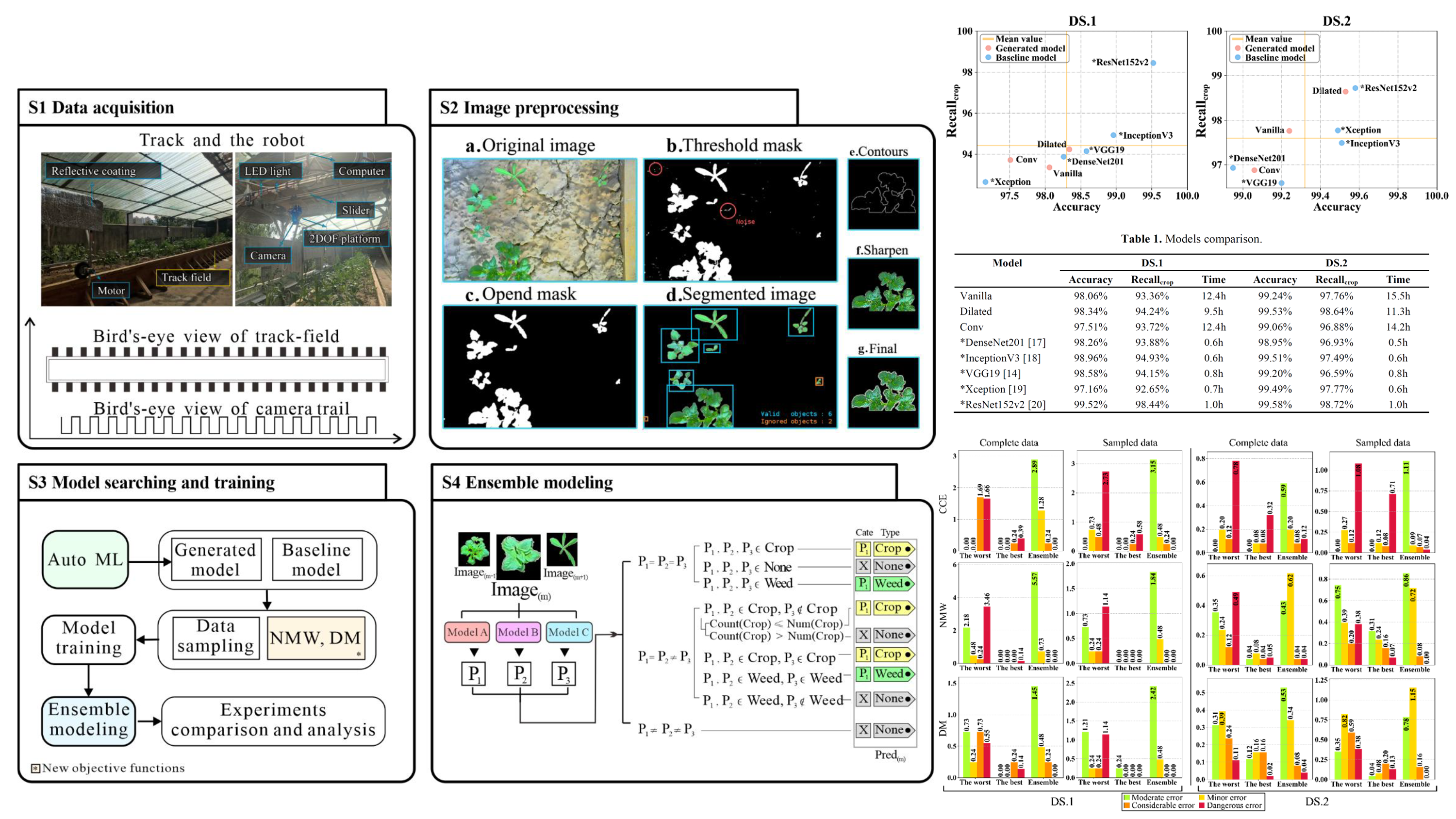
图7 第一代农业机器人搭载自动机器学习模型
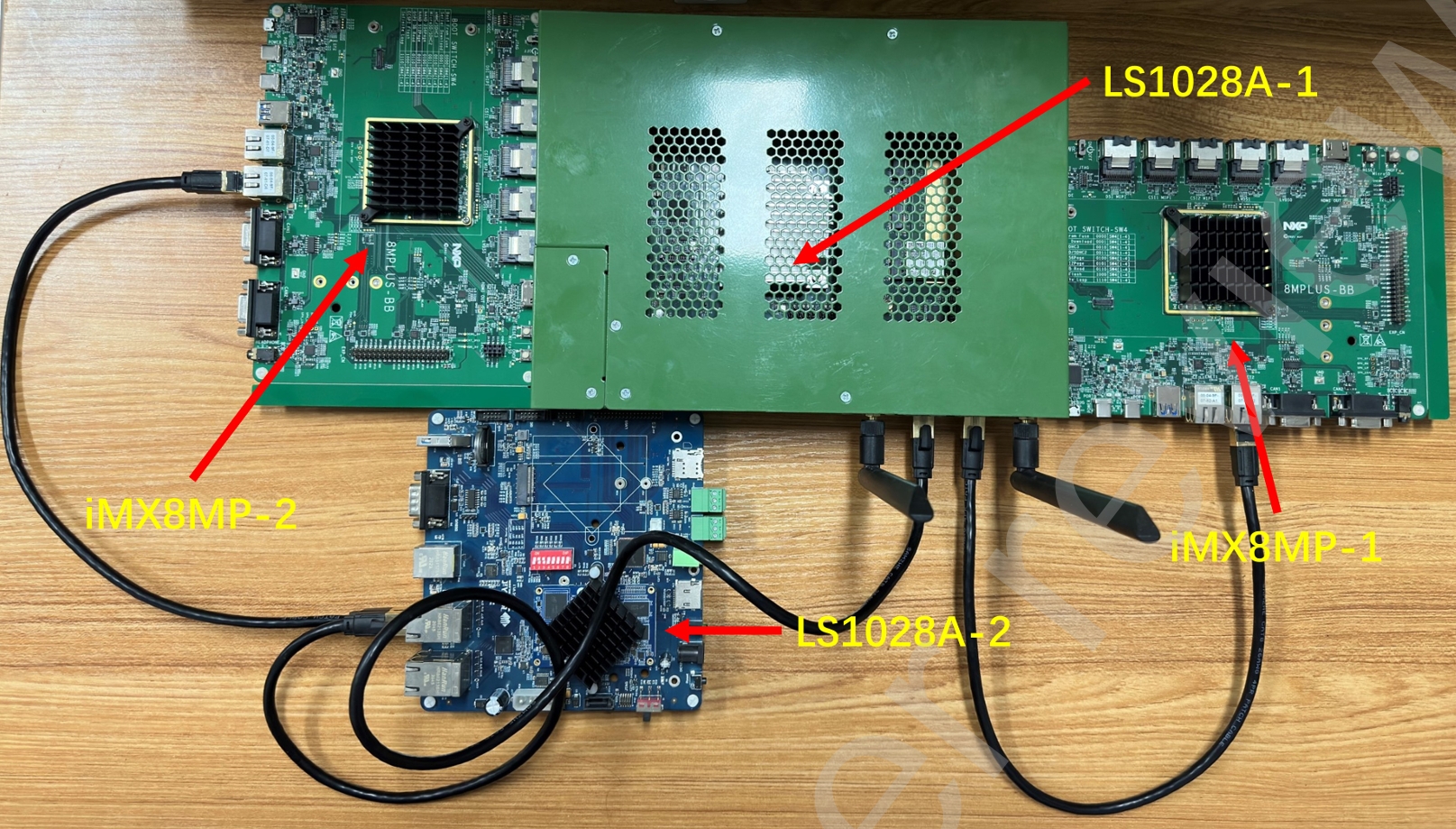
图8 TSN测试平台
AgRobot 项目列表
 |
AgRobot V1 | 第一代农业机器人 |
 |
AgRobot V1.5 | 第一代农业机器人执行框架 |
|
AgRobot V2 | 第二代四轮四转农业机器人 |
|
AgRobot V2 | 第二代履带式农业机器人 |
 |
Potatoes Dataset |